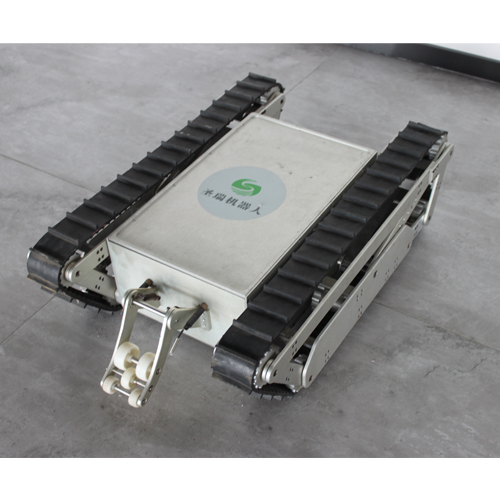
Nuclear power plant multifunctional underwater crawling and grabbing robot
keywords : Intelligent deviceModel : -
Price : 500000
Additional Information
A nuclear power station multifunctional underwater crawling robot is mainly used at the bottom of pond in the highly radioactive, narrow and boric acid environment inside the spent fuel building of reactor building in a new nuclear power station for salvage of foreign matters (including bolt, nut and other mechanical debris), video observation and other various underwater operations so as to achieve the in-service inspection and maintenance of key parts of a nuclear power station. The robot is of modular design, mainly composed of body, mechanical arm and underwater camera, all of which are completely mechanically and electrically isolated. After the relative positions among all modules are optimized, the robot not only becomes compact in structure but also achieve omnibearing observation of the operation site and flexible grabbing of foreign matters. Based specific environment, specific task and specific need, the underwater camera, mechanical arm and other parts can be installed selectively or the installation positions of parts can be adjusted.
Get in Touch with Us
Let us know your requirements and queries for a detailed reply